
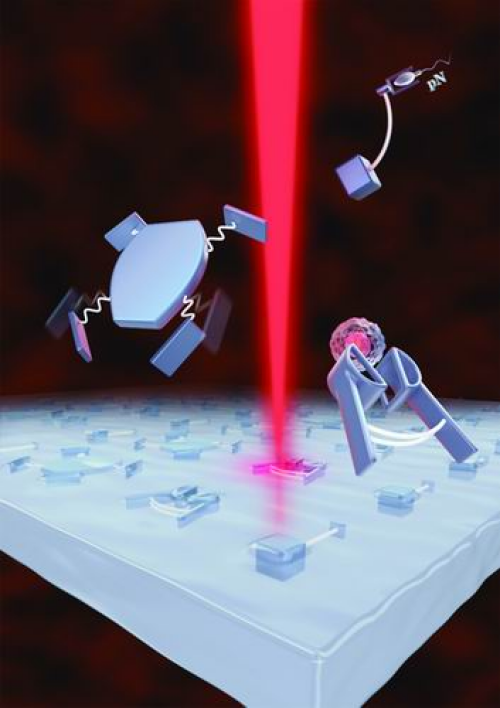
4D納米彈性體光刻策略制備各類軟體微米機器人的示意圖。研究團隊供圖
彈簧作為能量轉換器件,是小至鐘表、扭秤,大至汽車懸掛系統、原子力顯微鏡等裝置的關鍵部件。而在自然界中,細菌、精子等一些細胞和微生物也使用它們的納米級彈性菌絲進行傳感、驅動和捕食,其力感知靈敏度甚至達到納牛(10-9牛)乃至皮牛(10-12牛)級別。
這些微生物和細胞的生物力學特性令人著迷。把彈簧結構應用到微觀世界中,開發出具備彈性結構的微納器件,成為科學家長久以來的一大構想。
近日,中國科學院深圳先進技術研究院生物醫學與健康工程研究所(以下簡稱深圳先進院醫工所)副研究員徐海峰團隊通過自主開發的超彈磁性光刻膠,構建了彈性體4D納米光刻技術,制備出迄今最靈敏的人造彈簧系統——皮牛彈簧,探測靈敏度達到500飛牛(10-15牛),實現了皮牛力下微米級的形變。
基于此,該團隊還開發出一系列具有超靈敏度的軟體微米機器人,實現了高精度細胞操縱,有望為顯微外科手術和靶向藥物輸送等精準醫療領域提供新方法。該研究成果近日發表于《自然-納米技術》。
超靈敏人造彈簧實現定制化加工
在微觀世界中,一些細胞和微生物使用生物彈簧來執行力感知、捕食、驅動等動作。如果能借鑒這種生物力學特性,研發出超靈敏的仿生彈性器件,將有助于進行更為精準的細胞力學表征,甚至實現細胞的自由操縱,并有望應用在精準醫療、藥物遞送等領域。
“細胞力是細胞在執行正常生理功能時所產生的作用力,包括細胞的黏附力、遷移力、收縮力、伸展力等,在細胞生長、發育、分化、運動、損傷修復等過程中發揮重要作用。”徐海峰介紹說,感知和探測細胞力是超靈敏仿生彈性器件實現相關功能的重要一環。器件能探測越低的細胞力,則說明其靈敏度越高。
然而,傳統用于測算和感知細胞力學表征的原子力顯微鏡表征方法、流體力學計算方法等都極易受到干擾,且數據差異很大,無法實現細胞力學的精準表征。
此外,納米級器件的小變形可觀測性較差,易造成較大的數據誤差。而受限于細胞相容性彈性材料的高精度3D加工等難題,研發出能應用于細胞力學研究的大變形微米彈性器件仍面臨極大挑戰。
對此,研究團隊構想出一種微米級別的彈性機器人用以探測更低的細胞力,并運用首次構建的彈性模量維度4D納米彈性體光刻策略,制備了迄今最靈敏的人造彈簧系統。
“該系統具有納米級的特征尺寸,其力感知的靈敏度可以達到500飛牛,相當于單個細胞重力的一千分之一,并且其形變精度超過1 微米每皮牛。”徐海峰說。
這一新型皮牛彈簧支持高度自由的4D光刻加工,可以被定制化加工成任意形狀,同時完美兼容磁性光刻材料,可用于制備各類軟體微米機器人和柔性微米器件。
“這項工作開辟了探索生理、病理條件下分子、細胞和組織的力化生耦合動力學原理的新途徑。”中國力學學會副理事長、清華大學生物力學與醫學工程研究所教授馮西橋評價說。
系列軟體機器人助力精準醫療
在此前的研究中,徐海峰團隊分別開發了基于彈簧觸發的抗癌精子機器人以及抗血栓的精子火車機器人,相關研究成果發表于《美國化學會-納米》《德國應用化學》等期刊。然而,這些微米機器人的細胞力感知精度較差,且無法實現細胞的自由操縱。
2017年,徐海峰開始探索超靈敏仿生彈性機器人,并于2020年加入深圳先進院醫工所,開展磁驅微米機器人的研究。
“有三四年的時間,我們最大的困難便是如何實現彈性體光刻后機器人穩定成型。對此,研究團隊不斷積累研究經驗,通過改進光刻膠組成和激光寫入方式,解決了納米級皮牛彈簧的穩定成型問題。”徐海峰回憶說。
利用彈性模量維度的4D納米彈性體光刻策略,研究團隊開發了一系列細胞應用的軟體微米機器人,如用于測量精子驅動力的微米測力計、用于細胞操縱的微米夾持器等。
其中,微米測力計實現了對皮牛級細胞力產生微米級響應,在1皮牛作用力下可產生約1微米的形變。極高的靈敏度使之可以在精子等細胞作用下產生較大變形,用于測量包括精子機器人在內的物理、化學和生物復合等各類微米機器人的泳動力。
微米夾持器則可以被磁場獨立控制。該器件通過編程磁場模式,可以實現微米機器人翻滾、旋轉、夾持、釋放等多自由度運動的解耦控制,對特定目標物如活體細胞進行夾持和轉運。該過程不影響諸如光、熱、離子或pH值等任何細胞外部環境變化,實現了細胞的無影響操縱。
此外,在驗證實驗中,研究團隊還研發出仿生軟體微米機器人。該機器人具有集成的彈簧組,通過彈簧對磁場能量的儲存和編程釋放,實現了僅由磁場控制的20微米尺寸的微企鵝和微海龜的軟體驅動。
據了解,基于一系列超靈敏軟體微米機器人的成功探索,徐海峰團隊目前正在開展新型精準醫療設備的研發,并計劃將其逐步應用于細胞生物學及臨床研究,如超精度細胞力學自動化表征平臺和無干擾細胞操縱平臺等。
“基于該研究,未來新型微創甚至無創軟體微米機器人儀器將進一步為細胞力學研究、體內受精以及小腔道內血栓清除和神經干預等醫療任務提供有效助力。”徐海峰表示。
相關論文信息:https://doi.org/10.1038/s41565-023-01567-0
(原載于《中國科學報》?2024-01-08?第1版?要聞)
| 相關新聞: |
| 理化所等提出研制未來尖端機器人一般原則:液體集成(I-LIFE) |
| “人工智能手套”讓機器人有了觸感 |
| 全球首個液態全柔性智能機器人在津誕生 |


京公網安備110402500036號
© 中國科學院微電子研究所 版權所有
地址:北京市朝陽區北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學習園地