
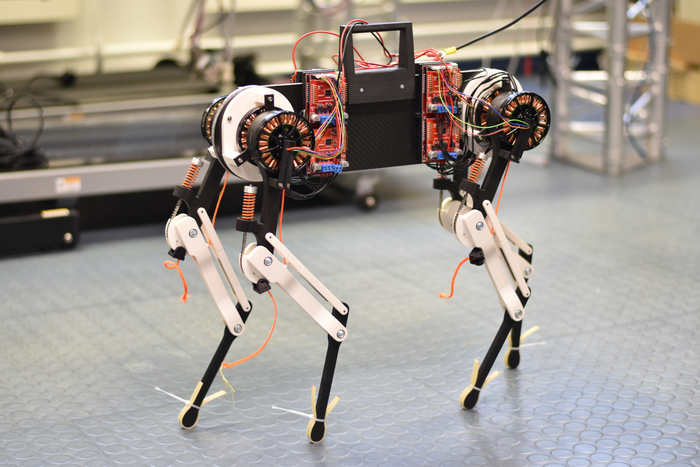
機器狗莫蒂
圖片來源:菲利克斯·魯珀特/MPI-IS動態(tài)運動小組
據(jù)18日《自然·機器智能》雜志報道,為了解動物如何學(xué)會走路和從絆倒中學(xué)習(xí),德國馬克斯·普朗克智能系統(tǒng)研究所(MPI-IS)研究人員建造了一個四足機器狗“莫蒂”,它僅僅用了一小時就學(xué)會了走路。
莫蒂充分利用了復(fù)雜的腿部力學(xué),通過貝葉斯優(yōu)化算法指導(dǎo)學(xué)習(xí):其足部傳感器信息與機器狗中運行的建模虛擬脊髓的目標(biāo)數(shù)據(jù)相匹配。機器狗通過不斷比較發(fā)送的和預(yù)期的傳感器信息、運行反射循環(huán)以及調(diào)整其電機控制模式來學(xué)習(xí)行走。
在人類和動物中,中央模式發(fā)生器(CPG)是脊髓中的神經(jīng)元網(wǎng)絡(luò),可在沒有大腦輸入的情況下產(chǎn)生周期性的肌肉收縮。其有助于生成有節(jié)奏的任務(wù),例如步行、眨眼或消化。機器狗莫蒂在大約一小時內(nèi)比動物更快地優(yōu)化其運動模式。
在機器狗平穩(wěn)行走期間,來自其腳部的傳感器數(shù)據(jù)不斷與機器狗CPG預(yù)測的預(yù)期著陸進行比較。如果機器狗絆倒,學(xué)習(xí)算法會改變腿來回擺動的距離、腿擺動的速度以及腿在地面上的長度。調(diào)整后的運動也會影響機器狗利用其腿部力學(xué)的能力。
在學(xué)習(xí)過程中,CPG發(fā)送經(jīng)過調(diào)整的電機信號,以便機器狗從此減少絆倒并優(yōu)化其行走。
論文第一作者、MPI-IS動態(tài)運動研究小組的前博士生菲利克斯·魯珀特表示:“我們的機器狗實際上是‘天生’的,CPG類似于大自然提供的內(nèi)置自動行走智能,我們已將其轉(zhuǎn)移給機器狗。當(dāng)數(shù)據(jù)從傳感器流回虛擬脊髓,與CPG數(shù)據(jù)進行比較,如果傳感器數(shù)據(jù)與預(yù)期數(shù)據(jù)不匹配,則學(xué)習(xí)算法會改變行走方式,直到機器狗行走良好且不會絆倒。”
| 相關(guān)新聞: |
| 首個可自我繁殖活體機器人問世 |
| 機器人既能“地上跑”也能“天上飛” |
| 轉(zhuǎn)起來吧!毫米級折紙機器人問世 |


京公網(wǎng)安備110402500036號
© 中國科學(xué)院微電子研究所 版權(quán)所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學(xué)習(xí)園地