
近日,中國科學院沈陽自動化研究所研究團隊在工業(yè)機器人故障診斷領域取得研究進展,提出了基于生成對抗網(wǎng)絡的工業(yè)機器人變工況故障診斷方法,有效提升了傳統(tǒng)數(shù)據(jù)驅動工業(yè)機器人故障診斷算方法的泛化能力。相關研究成果發(fā)表在IEEE Transactions on Instrumentation and Measurement上。
工業(yè)機器人被稱為“制造業(yè)皇冠頂端的明珠”,其研發(fā)制造應用是衡量一個國家科技創(chuàng)新和高端制造水平的重要標志。目前,工業(yè)機器人精度退化和設備故障問題突出,給企業(yè)安全生產(chǎn)和經(jīng)濟效益造成巨大負面影響。當前,隨著工業(yè)物聯(lián)網(wǎng)和工業(yè)大數(shù)據(jù)技術的進步,以機器學習特別是深度學習為代表的數(shù)據(jù)驅動方法已經(jīng)成為工業(yè)機器人故障診斷研究的熱點。然而,工業(yè)機器人實際運行過程中,轉速和負載處于持續(xù)改變過程中,嚴重影響了數(shù)據(jù)驅動方法的診斷性能。
針對上述問題,研究人員提出了基于深度感知對抗域自適應的工業(yè)機器人變工況故障診斷方法。該方法借助感知損失最小化技術,有效緩解了工業(yè)機器人工況變化帶來的對抗訓練不穩(wěn)定問題;在模型性能評價過程中,首次引入遷移任務難度這一關鍵維度信息,進一步完善了遷移學習模型性能評價體系。該研究還搭建了工業(yè)機器人健康監(jiān)測平臺,對工業(yè)機器人三種典型遷移場景(僅負載改變、僅轉速改變以及負載、轉速同時改變)的遷移難度進行了量化評估,并在三種遷移場景下對比了所提出方法與深度學習網(wǎng)絡和生成對抗網(wǎng)絡的性能,結果表明,所提出方法在遷移難度大的場景下體現(xiàn)出明顯優(yōu)勢。與此同時,考慮到故障診斷過程中需要同時采集來自機器人本體和控制器的數(shù)據(jù),為了提高工業(yè)機器人數(shù)據(jù)預處理效率,研究提出了基于時間戳映射的工業(yè)機器人數(shù)據(jù)篩選策略。研究成果有效提升了數(shù)據(jù)驅動裝備故障診斷方法的泛化能力,對于提升工業(yè)機器人平均故障間隔時間、縮短單臺機器人維修工期、降低裝備全壽命周期運維成本具有現(xiàn)實意義。
相關工作得到國家重點研發(fā)計劃和國家自然科學基金的支持。
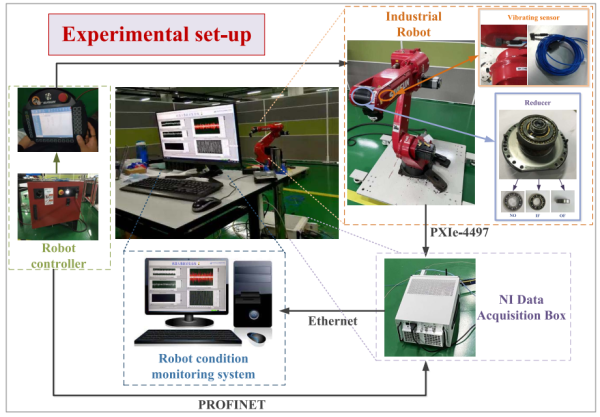
工業(yè)機器人實驗平臺設置
| 相關新聞: |
| 沈陽自動化所外肌肉機器人研究獲進展 |
| 沈陽自動化所磁控連續(xù)體微型機器人研究獲進展 |
| 沈陽自動化所在連續(xù)體機器人形狀感知研究方面取得進展 |


京公網(wǎng)安備110402500036號
© 中國科學院微電子研究所 版權所有
地址:北京市朝陽區(qū)北土城西路3號 郵編:100029
郵箱:icac@ime.ac.cn
學習園地