隨著高性能神經網絡需求的日益增長,神經-符號人工智能因其高度的可解釋性和適應性,正吸引著越來越多的關注。它可以通過符號知識增強深度學習的推理和泛化,表現出優于深度學習的能力。但由于符號知識表示與計算的復雜性,設計并實現高效的神經-符號硬件仍面臨算力、能效等諸多挑戰。
近日,微電子所集成電路制造技術重點實驗室劉明院士團隊提出了一種基于記憶交叉陣列的符號知識表示解決方案,首次實驗演示并驗證了憶阻神經-模糊硬件系統在無監督、有監督和遷移學習任務中的應用,為實現其他基于知識的技術提供了指導。團隊將模糊邏輯和規則形式的符號知識直接用記憶交叉陣列的拓撲結構表示,利用憶阻器件本征隨機性增強了知識表示的魯棒性,提高了系統的推理性能。為解決硬件原位訓練收斂速度慢、效果差的問題,團隊首次提出了一種軟硬件協同優化框架下的混合原位訓練技術,有效降低了計算過程中的累積誤差問題。研發的憶阻神經-模糊計算硬件能效超過FPGA兩個數量級以上,能耗僅為ASIC的約百分之一。以機器人導航為例,該神經-模糊硬件顯示出對未知環境的優越適應性,與深度學習方法相比,系統學習速度提高了約6.6倍,學習錯誤率降低了約6倍。該工作充分展示了憶阻神經形態計算系統在人工智能領域應用中的巨大潛力。
該工作得到了國家重點研發計劃、國家自然科學基金委、中國科學院戰略先導B類專項等項目支持。研究成果以“Stochastic neuro-fuzzy system implemented in memristor crossbar arrays”為題在Science Advances(《科學·進展》)期刊在線發表。微電子所時拓副研究員為文章第一作者,河北大學閆小兵教授、復旦大學劉琦教授為共同通訊作者。
????全文鏈接:https://www.science.org/doi/10.1126/sciadv.adl3135
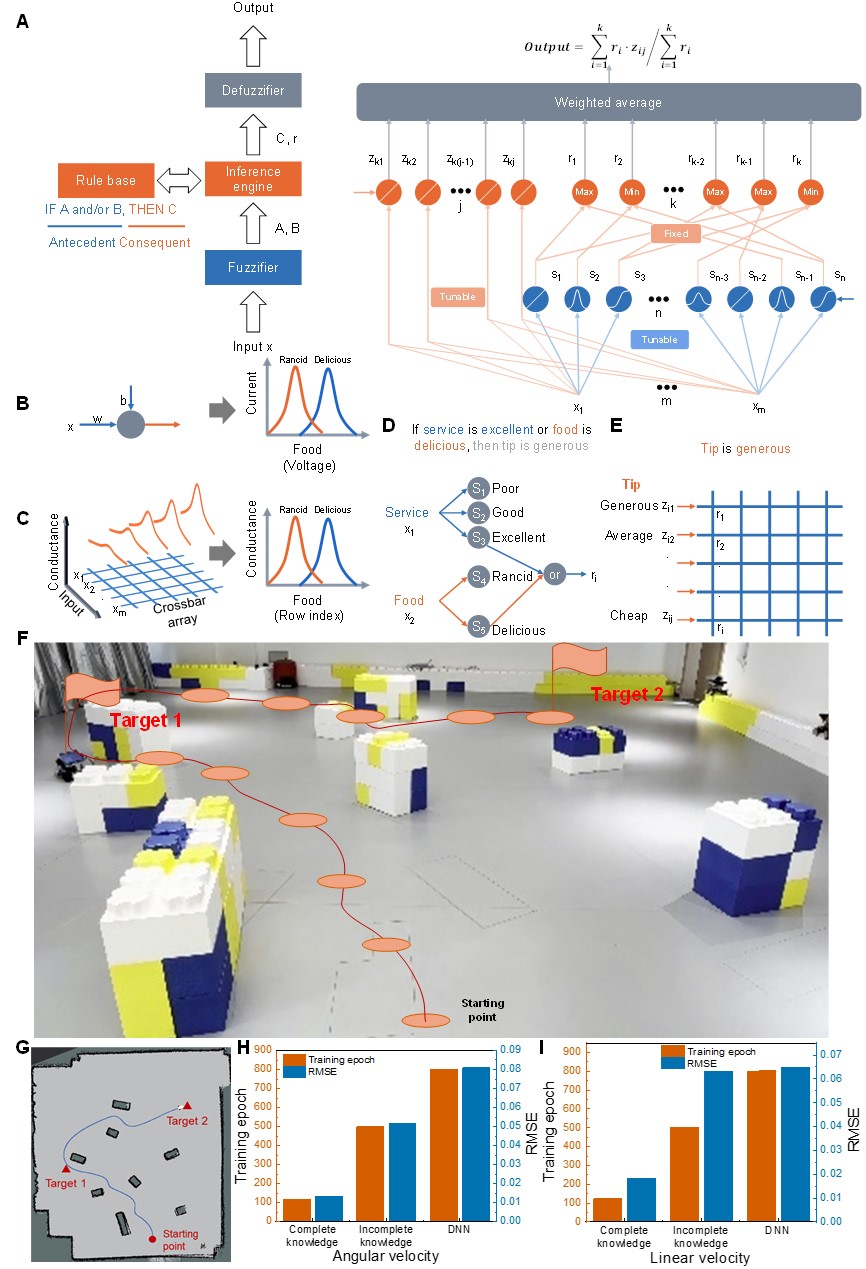
圖:(A)模糊推理系統和所提出的神經-模糊系統的示意圖
(B)隸屬度函數的隱式實現方式
(C)隸屬度函數的顯式實現方式
(D)通過稀疏連接實現模糊規則的antecedent
(E)基于憶阻交叉陣列的去模糊化硬件實現方法
(F)基于憶阻硬件系統的實時機器人導航實驗
(G)機器人運動軌跡可視化的實時地圖
(H)神經-模糊硬件在原位訓練中角速度的收斂速度和測試誤差率
(I)線速度的收斂速度和測試誤差率
綜合信息